barilline.ru
barilline.ruСоздан робот-рыба, приводимый в действие искусственной "электрической кровью" - «Наука и технологии»

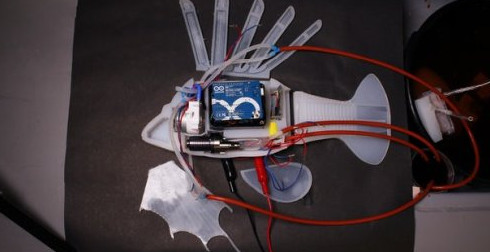
Группа исследователей из Лаборатории органической робототехники Корнуэльского университета создала робота-рыбу с мягким телом, которая приводится в действие искусственной "электрической кровью". Эта "кровь" является не только источником электроэнергии, она также выступает в

Группа исследователей из Лаборатории органической робототехники Корнуэльского университета создала робота-рыбу с мягким телом, которая приводится в действие искусственной "электрической кровью". Эта "кровь" является не только источником электроэнергии, она также выступает в роли рабочей жидкости гидравлической системы, обеспечивающей движение робота. Такой "биовдохновленный" подход позволяет сгладить в некоторой степени основную проблему небольших автономных роботов - конфликт массы и количества имеющейся в распоряжении робота энергии.
На аккумуляторные батареи, являющиеся источником энергии в большинстве случаев, приходится большая часть веса роботов. А большой вес влияет отрицательным образом на маневренность, скорость и другие параметры. И, если удается заставить один из компонентов робототехнической системы выполнять одновременно две функции, одной из которых является хранение энергии, то острота вышеописанной проблемы снижается в два раза.
Прототипом для робота является достаточно известная рыба-лев (lionfish), которая имеет массу других официальных и неофициальных названий. Тело робота, длиной 40 сантиметров, изготовлено из формованного силикона. Внутри робота есть два миниатюрных гидравлических насоса, каждый из которых приводится в действие потоковой цинковой батареей. Первый насос обеспечивает циркуляцию жидкости по телу робота, а второй - по ее плавникам. Работа этих насосов обеспечивает движение тела, которое заставляет двигаться робота вперед со скоростью приблизительно полутора длин его тела в минуту.
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Смотрите также
из категории "Технологии"