barilline.ru
barilline.ruЯпонцы создали пальцы для роботов, приводимые в действие искусственными мускулами, выращенными в лаборатории - «Наука и технологии»

Обычно при создании новых роботов инженеры начинают разрабатывать его конструкцию практически с "чистого листа". Однако сама природа за множество лет эволюции нашла самые оптимальные решения, материалы и принципы движения, так почему бы не взять за основу то, что уже давно создала
Обычно при создании новых роботов инженеры начинают разрабатывать его конструкцию практически с "чистого листа". Однако сама природа за множество лет эволюции нашла самые оптимальные решения, материалы и принципы движения, так почему бы не взять за основу то, что уже давно создала природа? По такому пути пошла группа японских исследователей-робототехников, они нашли новый способ совмещения искусственных живых тканей с механическим скелетом и заставили все это совершать движения, очень близкие по параметрам к движениям живых существ.
Это является далеко не первым разом, когда исследователи "смешивают" механические системы с компонентами, состоящими из живых клеток. В 2016 году мы рассказывали о создании крошечного робота-ската, приводимого в действие клетками тканей сердечной мышцы, которые активировались при помощи света. А немного позже другая группа исследователей создала ползающего робота, "напечатанного" из живых клеток при помощи трехмерного принтера.
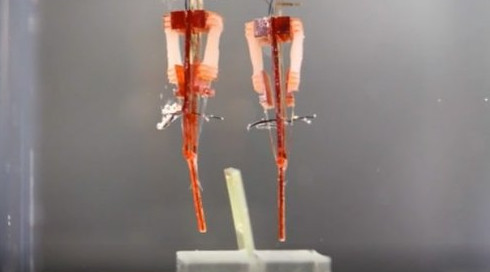
В своих исследованиях ученые из Токийского университета вырастили живые мускульные ткани поверх механического скелета. Этот процесс был начат с листов гидрогеля, содержащего миобласты, клетки-зародыши мускульных тканей. Пластины гидрогеля были приложены к определенным местам каркаса, и когда миобласты превратились в нормальные клетки, то эти искусственные мускулы оказались надежно прикреплены к скелету.
Для стимуляции этих искусственных мускулов в них были внедрены электроды. Подаваемые электрические сигналы заставили мускулы сокращаться и расслабляться, изгибая механический палец в его единственном суставе. Использование двух мускулов, работающих в противофазе, позволило ученым реализовать более плавное движение и получить достаточно сильное усилие изгиба сустава.
При этом, оба искусственных мускула постоянно "тренировали" друг друга при совершении движений. Это позволило им проработать больше недели без каких-либо ухудшений их возможностей.
"Мы показали, что использование антагонистического расположения пар мускулов позволяет роботам подражать движениям тела живого существа" - рассказывает Юя Моримото (Yuya Morimoto), ведущий исследователь, - "Если в будущем мы сумеем объединить более количество искусственных мускулов в одном устройстве, это устройство получит возможность воспроизведения более сложных движений, в точности повторяющих движения наших рук, ног и других частей тела".
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Смотрите также
из категории "Технологии"