 barilline.ru
barilline.ruСоздан миниатюрный захват, скопированный со строения конечностей геккона - «Наука и технологии»
Гекконы являются уникальными существами из-за особенностей строения их конечностей, благодаря которым они без затруднений могут перемещаться по вертикальным поверхностям и по потолку вверх ногами. Такие возможности гекконов стали объектом пристального внимания со стороны робототехников, которые
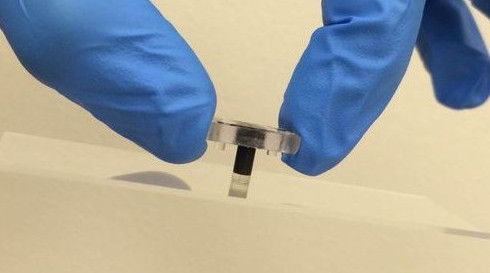
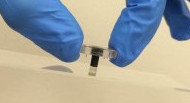
Гекконы являются уникальными существами из-за особенностей строения их конечностей, благодаря которым они без затруднений могут перемещаться по вертикальным поверхностям и по потолку вверх ногами. Такие возможности гекконов стали объектом пристального внимания со стороны робототехников, которые уже создали экспериментальных роботов, копирующих принципы строения конечностей и за счет этого способных передвигаться по вертикальным стенам. А ученые из университета Пенсильвании, используя схожие принципы, создали достаточно простой и миниатюрный управляемый захват, позволяющий удерживать хрупкие компоненты, используемые в производстве электронных устройств без необходимости применения вакуумных присосок или липкой ленты, оставляющей на поверхности следы.
Основой нового миниатюрного захвата стал материал, изготовленный учеными из Института новых материалов, Лейбниц, Германия. Поверхность этого материала покрыта микроскопическими волосками, имеющими на конце небольшие утолщения, подобные волоскам, находящимся на поверхности конечностей геккона. Эти волоски притягиваются к поверхности за счет сил молекулярного притяжения, так называемых сил Ван дер Ваальса. Большое количество волосков позволяет получить достаточно значимые удерживающие силы, а управление этими волосками осуществляется электронным способом. Единственной проблемой является то, что изготовление столь сложных микроскопических структур является само по себе сложным делом.
Однако, создавая миниатюрный захват, ученые из Пенсильвании использовали несколько иной подход, нежели ученые из Германии. Они не стали повторять в точности структуру волосков с утолщением на концах, а изготовили простые цилиндрические "волоски" из достаточно твердого пластика, которые были окружены тонким слоем мягкой силиконовой резины. Такое изменение позволяет добиться того же самого эффекта, а "выключить" режим прилипания захвата к поверхности можно приложив небольшое боковое усилие.
"Когда дело доходит до реализации управляемого прилипания к поверхности, все пытаются максимально точно скопировать структуру конечностей геккона" - пишут исследователи, - "Проблема заключается в том, что искусственным методом достаточно сложно повторить то, что создала природа. Но нам удалось придумать новый принцип, реализующий подобную технологию прилипания, но который гораздо проще и дешевле реализовать на практике".
Используя разработанные ими принципы, исследователи изготовили опытные образцы захватов, диаметр которых равен нескольким миллиметрам. Эти захваты способны надежно удерживать даже вещи с очень гладкой поверхностью, такие, как стекло и крошечные радиоэлектронные компоненты с керамическими корпусами. Но самое интересное заключается в том, что поверхности захватов со сложной структурой будут работать с такой же эффективностью, когда их размеры будут сокращены до микроскопического уровня.
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Смотрите также
из категории "Технологии"






