barilline.ru
barilline.ruУченые создали биороботов с живыми мышечными тканями, которые способны "ходить" под воздействием света - «Наука и технологии»

Уже достаточно давно ученые пытаются найти лучшие способы совмещения биологических тканей и робототехнических технологий. Биологические материалы могут дать роботам возможность быстрой адаптации к резким изменениям окружающей среды. И это может оказаться весьма полезной функцией для

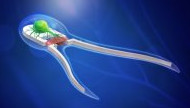
Уже достаточно давно ученые пытаются найти лучшие способы совмещения биологических тканей и робототехнических технологий. Биологические материалы могут дать роботам возможность быстрой адаптации к резким изменениям окружающей среды. И это может оказаться весьма полезной функцией для многофункциональных устройств-имплантатов, микророботов, осуществляющих целевую доставку лекарственных препаратов и т.п. Одной из групп ученых, работающих в данном направлении, является группа из университета Иллинойса. В свое время мы рассказывали о созданном им биороботе, в конструкции которого использовались искусственные ткани сердечной мышцы, активируемые импульсами электрического тока. А последней разработкой этой же группы является биоробот с искусственными мышечными тканями, которые сокращаются и заставляют робота двигаться под воздействием импульсов света.
Для того, чтобы вырастить искусственную мышцу, подражающую обычным мышцам, связанным с сухожилиями, исследователи напечатали при помощи трехмерного принтера специальную структуру, скелет, на которой производилось выращивание искусственных тканей. Кроме этого, клетки тканей были модифицированы на генном уровне так, что они начинали сокращаться в ответ на воздействие импульсов света.
Для того, чтобы выяснить необходимую форму и толщину искусственной мышцы, при которой она обеспечивает максимальное усилие сокращения, исследователям пришлось перепробовать массу вариантов. Из всей массы было выбрано несколько вариантов и было создано несколько биороботов, которых ученые начали ежедневно усиленно тренировать для того, чтобы их искусственные мышцы обрели большую силу. И в результате на белый свет появился биоробот, способный самостоятельно перемещаться в сторону источника света, пульсации которого заставляли работать это гибридное устройство.
Проведя исследования вариантов искусственных мышц, обеспечивающих максимальную эффективность работы, ученые выяснили, что структура из тонких колец позволяет питательным веществам проникать внутрь мышечной ткани со всех сторон. Кроме этого, ученые измерили концентрацию моторного белка, миозина и вычислили корреляцию межу концентрацией белка и реальной физической силой искусственной мышцы.
"Реализованный нами подход обеспечивает максимальную гибкость" - рассказывает Рашид Башир (Rashid Bashir), профессор биоинженерии из университета Иллинойса, - "Используя кольцевые мышцы, мы можем соединять любые типы суставов, изготовленных при помощи трехмерной печати. Мы можем создавать биороботов, обладающих любым количеством конечностей и любым количеством отдельных мышц, а при помощи направленного света мы можем заставить их двигаться в любом направлении. Теперь при помощи данных технологий мы будем пытаться создать биоробототехнические системы более высокого порядка".
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Смотрите также
из категории "Технологии"