barilline.ru
barilline.ruЗахват нового типа позволяет роботам брать и перемещать самые "неудобные" предметы - «Наука и технологии»

Любой человек, кому приходилось иметь дело с роботизированным манипулятором, знаком с ситуацией, когда этом манипулятор не может захватить и удерживать предмет в силу различных причин. Система управления этим манипулятором не может решить, в какое положение поместить захват относительно объекта

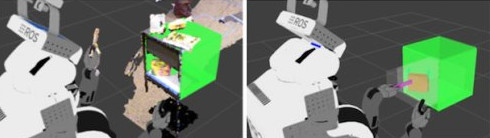
Любой человек, кому приходилось иметь дело с роботизированным манипулятором, знаком с ситуацией, когда этом манипулятор не может захватить и удерживать предмет в силу различных причин. Система управления этим манипулятором не может решить, в какое положение поместить захват относительно объекта "неудобной" формы, а в некоторых случаях принятию "правильного" положения захвата препятствуют его собственная форма и другие находящиеся рядом предметы. Несколько лет назад Майя Кэкмак (Maya Cakmak) из Вашингтонского университета на конференции по робототехнике IROS представила идею использования для удержания объектов нескольких видов различных простых захватов, изготовленных при помощи трехмерной печати. А на конференции ICRA в пошлом месяце Майя Кэкмак представила вниманию общественности конструкцию нового универсального захвата, при помощи которого робот типа PR2 сможет удерживать даже самые "неудобные" для этого предметы.
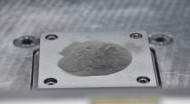
Новый инструмент для робота представляет собой "прямоугольную призму с ручкой", но самым главным элементом является кремниевая пластина с текстурированной особым образом поверхностью, обеспечивающей максимально высокий коэффициент трения с поверхностью удерживаемого предмета. Согласно имеющейся информации, данный вид захвата "является идеальным для того, чтобы произвести захват и удержание любого предмета с минимальной площадью контакта и в условиях ограниченного пространства. Высокий коэффициент трения поверхности позволяет манипулировать объектами абсолютно любой формы, а не только геометрически правильных форм. Возможность использовать только кончик захвата, а не всю его площадь, позволяет значительно расширить ряд выполняемых роботом действий".
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Смотрите также
из категории "Технологии"