barilline.ru
barilline.ruСоздан робот-гусеница, приводимый в действие и контролируемый при помощи света - «Наука и технологии»

Группа исследователей из Варшавского университета, используя жидкокристаллический эластомер, разработанный учеными из института LENS во Флоренции, создали биовдохновленного робота-гусеницу, который достаточно точно копирует принцип движения живой гусеницы. Этот мягкий робот, длина которого равна

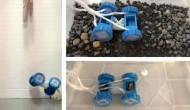
Группа исследователей из Варшавского университета, используя жидкокристаллический эластомер, разработанный учеными из института LENS во Флоренции, создали биовдохновленного робота-гусеницу, который достаточно точно копирует принцип движения живой гусеницы. Этот мягкий робот, длина которого равна 15 миллиметрам, получает энергию от луча лазерного зеленого света, а управление движением робота производится при помощи модуляции того же самого луча света. Помимо возможности передвижения по плоской поверхности, робот может перемещаться по наклонным поверхностям, проходить сквозь узкие места и даже передвигать достаточно массивные грузы.
Жидкокристаллический эластомер (Liquid Crystalline Elastomer, LCE) представляет собой один из видов "умных" материалов, которые способны изменять свою форму под воздействием света видимого диапазона. Благодаря некоторым современным технологиям, в частности технологии трехмерной печати, этому материалу может быть придана любая необходимая форма, при помощи которой реализуется определенная функциональность создаваемого устройства. Управление при помощи света деформацией тела робота позволяет ему выполнять достаточно сложные движения и действия без необходимости использования двигателей, приводов и других дискретных элементов.
Корпус робота-гусеницы имеет в своем составе полосу из светочувствительного материала, молекулы которого искусственно выровнены по определенному шаблону. Воздействие света, модулированного соответствующим образом, заставляет отдельные участки тела робота сокращаться, изгибаться или растягиваться. Благодаря этому мягкий робот не только достаточно точно подражает движениям живой гусеницы, он обладает достаточно большой силой, позволяющей ему передвигать предметы с массой, превышающей массу самого робота в десятки раз.
"Проектирование мягких роботов требует использования абсолютно новых принципов механики, энергетики и управления. И все это уже давным-давно реализовано в живой природе, нам остается только взять и приспособить все это для использования в новых технологиях" - рассказывает Петр Вазилкцик (Piotr Wasylczyk), глава одной из лабораторий факультета физики Варшавского университета, - "А в будущем подобные материалы, технологии изготовления и принципы проектирования будут использоваться в новых областях робототехники, действующих на миллиметровом и субмиллиметровом уровне масштаба, включая создание плавающих и даже летающих микророботов".
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Смотрите также
из категории "Технологии"