 barilline.ru
barilline.ruSIMbot - робот, передвигающийся на единственном электрически заряженном шаре - «Наука и технологии»

Принято считать, что механизм, способный выполнять сложные движения и маневры, должен быть сам по себе достаточно сложным. Это утверждение было опровергнуто несколько лет назад группой создателей робота Ballbot, робота, способного балансировать и передвигаться, стоя на одном большом шаре. И

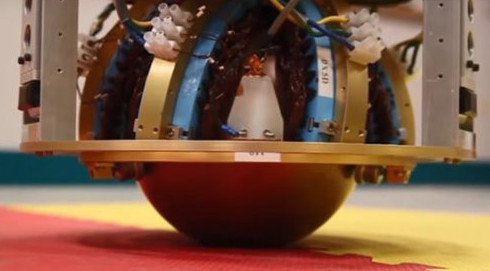
Принято считать, что механизм, способный выполнять сложные движения и маневры, должен быть сам по себе достаточно сложным. Это утверждение было опровергнуто несколько лет назад группой создателей робота Ballbot, робота, способного балансировать и передвигаться, стоя на одном большом шаре. И недавно группа создателей робота Ballbot вернулась со своим новым творением, роботом SIMbot, шар которого представляет собой ротор асинхронного электрического двигателя. За счет этого конструкция робота упростилась до самого минимума и в ней насчитывается всего одна движущаяся часть.
Оригинальный робот Ballbot был разработан группой профессора Ральфа Холлиса (Ralph Hollis) из университета Карнеги-Мелоун (Carnegie Mellon University). Этот высокий и тонкий робот, имеющий питание от аккумуляторных батарей, имеет большую маневренность и занимает очень мало места, что дает ему ряд очевидных преимуществ в условиях стесненной окружающей среды. Он способен проходить в узкие проемы, с достаточно высокой скоростью передвигаться между столами в офисных помещениях и освобождать место для прохода людей.
Конструкция робота Ballbot оказалась настолько удачной, что ее повторили другие робототехники из Японии, Швейцарии и Испании. Кроме этого, был разработан робот mObi, который уже используется в некоторых больницах и офисах крупных компаний.
Однако, конструкция робота Ballbot не лишена ряда серьезных недостатков. В ней присутствует большое количество движущихся механических узлов, некоторые из которых, в частности ролики, вращающие шар в разных направлениях, быстро изнашиваются и требуют достаточно частой замены. "Замена "пояса" роликов является достаточно сложным делом" - рассказывает Майкл Шомин (Michael Shomin), один из исследователей, - "Кроме того, после каждой такой замены система робота должна быть перенастроена и откалибрована на специальном стенде".
Обнаружив вышеописанные недостатки, группа разработчиков задумалась над упрощением конструкции разработанного ими робота. Это привело их к идее превратить шар робота в ротор асинхронного электрического двигателя, способного вращаться в любом направлении. Но реализация этой идеи в виде сферического асинхронного двигателя (spherical induction motors, SIM) оказалась достаточно сложной задачей, с которой исследователям удалось справиться благодаря сложному компьютерному моделированию и разработанным алгоритмам управления таким двигателем.
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Смотрите также
из категории "Технологии"






