barilline.ru
barilline.ruРазработана технология управления мягкими роботами при помощи магнитного поля - «Наука и технологии»

Группа исследователей из университета Северной Каролины (North Carolina State University) разработала новую технологию управления движениями и действиями небольших мягких роботов. В этой технологии используется магнитное поле, воздействующее на упорядоченные особым образом цепочки магнитных
Группа исследователей из университета Северной Каролины (North Carolina State University) разработала новую технологию управления движениями и действиями небольших мягких роботов. В этой технологии используется магнитное поле, воздействующее на упорядоченные особым образом цепочки магнитных микрочастиц, включенных в мягкий полимерный материал тела робота. И, используя этот подход, исследователи создали ряд демонстрационных микророботов, имеющих различную форму и функциональные особенности.
Для изготовления тела мягких роботов исследователи использовали жидкий полимер, в объем которого было введено некоторое количество железных микрочастиц. Эти частицы были упорядочены в виде параллельных цепочек при помощи воздействия внешнего магнитного поля. И после полимеризации материал превратился в мягкую и упругую пленку, внутри которой находятся магнитные цепочки, обладающие заранее заданными свойствами.
"Наличие этих цепочек позволяет нам при помощи внешнего магнитного поля контролировать движения и действия этих мягких микророботов" - рассказывает профессор Джо Трейси (Joe Tracy), - "Меняя направленность и интенсивность этого поля, мы можем заставить микророботов выполнять работу по целевой доставке лекарственных препаратов, по разрушению сгустков, закупоривших кровеносные сосуды, и по перекачке жидкостей внутри тела человека. Кроме этого, такие роботы могут заниматься созданием, развертыванием более сложных складных структур элементами которых являются они сами".
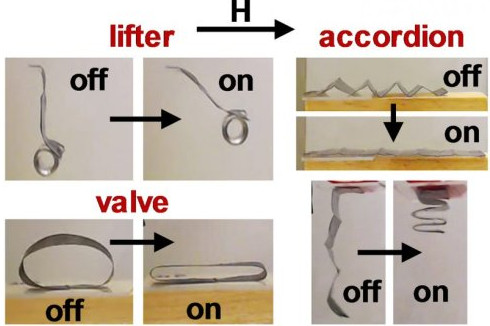
Цепочки из магнитных частиц, реагирующие на внешнее магнитное поле, обладают достаточно большой силой. Один из экземпляров опытных образцов мягких роботов способен поднимать вес, в 50 раз превышающий его собственный вес. Второй робот имеет форму, напоминающую форму мехов аккордеона, такой робот может сокращаться и удлиняться, выполняя роль искусственного мускула. А третье устройство в виде трубы может работать в качестве насоса, действуя, как человек, выдавливающий зубную пасту из тюбика.
Следующими шагами ученых будут работы, направленные на увеличение силы и улучшение точности контроля за движением этих крошечных мягких устройств. "И это позволит нам существенно расширить потенциал мягкой робототехники, области, которая развивается бурными темпами в последнее время" - рассказывает Джо Трейси.
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Смотрите также
из категории "Технологии"