barilline.ru
barilline.ruИнженеры запрограммировали крошечных роботов для того, чтобы они могли действовать, двигаться и "думать", подобно живым насекомым - «Наука и технологии»

В свое время ученые и инженеры из различных организаций добились немалых успехов в деле создания крошечных роботов-насекомых. Однако, программирование таких роботов для того, чтобы они могли действовать самостоятельно и вести себя, подобно реальным насекомым, представляет собой серьезную проблему
В свое время ученые и инженеры из различных организаций добились немалых успехов в деле создания крошечных роботов-насекомых. Однако, программирование таких роботов для того, чтобы они могли действовать самостоятельно и вести себя, подобно реальным насекомым, представляет собой серьезную проблему технического плана. Однако, группа инженеров из Корнуэльского университета провела ряд экспериментов с применением нового вида программирования, которое во многом походит на обработку информации в простейших мозгах насекомых. И полученные в ходе этих экспериментов результаты указывают на то, что в будущем, увидев муху, ползающую по окну или монитору, вы не сможете с уверенностью сказать, является она живым созданием или искусно изготовленным роботом.
С точки зрения требующейся вычислительной мощности, для того, чтобы крошечный робот смог ощутить порыв ветра при помощи датчиков-волосков, расположенных на его крыльях, и изменить свой полет так, чтобы сесть на колеблющийся под этим ветром цветок, этому роботу потребуется нести на своей спине компьютер, размером с нормальный настольный компьютер. Однако, подобные задачи с легкостью могут решаться с использованием нейроморфных процессоров и даже специализированных нейроморфных чипов.
В отличие от традиционных цифровых чипов, которые обрабатывают данные, представленные в виде последовательности логических 0 и 1, нейроморфные чипы обрабатывают пики и всплески протекающего через них электрического тока, которые могут иметь разную форму и объединяться в сложные комбинации. Специалисты из лаборатории Сильвии Феррари уже разработали ряд алгоритмов обработки данных и управления, предназначенные для выполнения на нейроморфных чипах, работа которых весьма напоминает то, что происходит в мозге насекомых. Более того, при решении задач определенного вида нейроморфные чипы требуют для своей работы гораздо меньшего количества энергии, нежели традиционные процессоры.
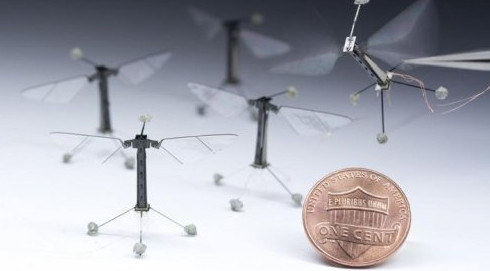
Роботами, которые получили систему управления на базе нейроморфных чипов, стали известные нашим читателям 80-миллиграмовые роботы RoboBee, разработанные в Лаборатории микроробототехники Гарвадского университета и оснащенные оптическими датчиками движения и крошечной камерой. К сожалению, нынешний робот RoboBee все еще нуждается в "привязи", связывающей его с внешним источником энергии, но исследователи из Гарварда уже работают над разработкой нового источника, который позволит роботу стать полностью автономной единицей. А алгоритмы, разработанные в Корнуэльском университете, позволят сделать робота RoboBee более адаптивным и приспосабливаемым к окружающей среде без необходимости значительного увеличения веса самого робота.
В настоящее время учеными из Корнуэла создан виртуальный симулятор, в основу которого заложены все базовые физические принципы и законы. Этот симулятор позволяет моделировать робота RoboBee и рассчитывать мгновенные аэродинамические силы, возникающие и действующие при каждом взмахе крыльев робота. В результате этот симулятор может очень точно рассчитать траекторию движения робота во время полета в очень сложной окружающей среде, что, в свою очередь, позволяет ученым отладить их нейроморфные алгоритмы управления.
Благодаря совместной работе исследователей из Гарварда и Корнуэла, робот RoboBee вскоре получит целый ряд новых микроустройств, таких, как камера и антенны, позволяющие принимать сигналы обратной связи от крошечных датчиков на конечностях робота и датчиков потока воздуха, которые похожи на волосинки и которые находятся на крыльях.
Однако, на свете уже имеется робот, который получил систему управления на базе нейроморфного чипа. Этим роботом является 17-миллиметровый четвероногий робот Harvard Ambulatory Microrobot, вес которого составляет всего 3 грамма. Благодаря новой системе управления этот крошечный робот может развивать скорость до 44 сантиметров в секунду, а ряд дополнительных алгоритмов, подготовкой которых уже занимаются Корнуэльские исследователи, позволят этому роботу не только бегать с высокой скоростью, но и совершать при этом достаточно сложные маневры.
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Смотрите также
из категории "Технологии"