barilline.ru
barilline.ruOmnicopter от ETH Zurich - беспилотник, который не имеет ни верха, ни низа, ни правой и левой стороны - «Наука и технологии»
Большинство созданных людьми летательных аппаратов имеют максимальную эффективность при полете в каком-либо определенном направлении. Даже такие аппараты, как вертолеты и квадрокоптеры имеют приоритетное направление полета, что обусловлено взаимным расположением их двигателей, аэродинамикой
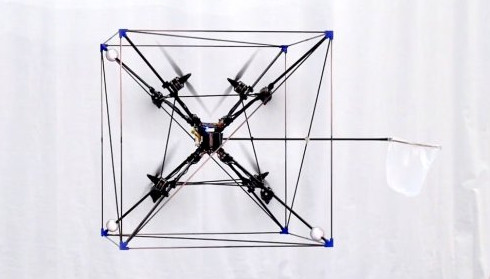
Большинство созданных людьми летательных аппаратов имеют максимальную эффективность при полете в каком-либо определенном направлении. Даже такие аппараты, как вертолеты и квадрокоптеры имеют приоритетное направление полета, что обусловлено взаимным расположением их двигателей, аэродинамикой фюзеляжа, местом расположения стабилизирующих и управляющих плоскостей. Одним из немногих исключений из всего вышеперечисленного является беспилотный летательный аппарат Omnicopter, который летает отличным от всех других аппаратов образом. Его восемь двигателей с пропеллерами ориентированы в разных направлениях, благодаря чему у этого летательного аппарата полностью отсутствуют понятия верха и низа, правой и левой сторон.
Летать такому беспилотнику позволяет специальный программный генератор траектории, который учитывает все шесть степеней свободы летательного аппарата. Код этого генератора был написан с расчетом на скорость и эффективность, в секунду генератор может выполнить расчет около 500 тысяч траекторий полета, выбрать из них наиболее подходящую и рассчитать соответствующие команды управления двигателями.
Все продемонстрированное на приведенном ниже видеоролике говорит о том, что такие летательные аппараты представляют собой будущее технологий воздушного манипулирования и транспортировки различных объектов. Сейчас для этого используют традиционные вертолеты и многороторные аппараты, которые имеют гораздо меньшую вариативность в выборе движений. Стоит лишь прикрепить к такому летательному аппарату, как Omnicopter, захват или манипулятор, как он превратится в универсального летающего робота, способного выполнить достаточно широкий ряд движений и перемещений.
Ручное управление беспилотником Omnicopter является достаточно сложным делом. Но его может максимально облегчить интеллектуальная система управления, получающая данные от внешней системы захвата и отслеживания движений. При таком подходе и с учетом использования камер с высокой разрешающей способностью, этот летательный аппарат способен выполнять заданные движения с филигранной точностью.
И в заключение следует отметить, что летательный аппарат Omnicopter, программное обеспечение и другие сопутствующие системы были разработаны и изготовлены Дарио Брешанини (Dario Brescianini) и Раффаэло Д'Андреа (Raffaello D'Andrea) из Института управления динамическими системами (the Institute for Dynamic Systems and Control, IDSC)) Швейцарского федерального технологического института (Swiss Federal Institute of Technology, ETH) в Цюрихе.
Подпишитесь
И будьте в курсе первыми!
И будьте в курсе первыми!
Минимальная длина комментария - 50 знаков. комментарии модерируются
Смотрите также
из категории "Технологии"